Smarter Roads, Part 7: Where You Mount the Camera Changes Everything
At the end of Part 6, I set myself one task: get the GoPro off the desk and onto the car.
This chapter is the result. Three mounting positions with real footage and clear trade-offs.
Where you mount it and at what angle determines what proportion of each frame is actually useful data.
From the Spec Sheet to the Street
Part 6 compared three camera platforms across optical, mechanical, and system constraints. The GoPro came out as the optical leader with excellent low‑light performance, and a fixed‑focus lens well‑matched to the 3–5 m working distances typical of vehicle‑mounted sensing.
But that comparison was entirely on paper.
Real‑world deployment adds a layer of decisions no spec sheet can answer:
- Where on the vehicle should the camera sit?
- At what height above the road surface?
- At what downward angle?
- And what do those choices do to the data you actually collect?
These are the questions this experiment was designed to answer.
The Three Positions
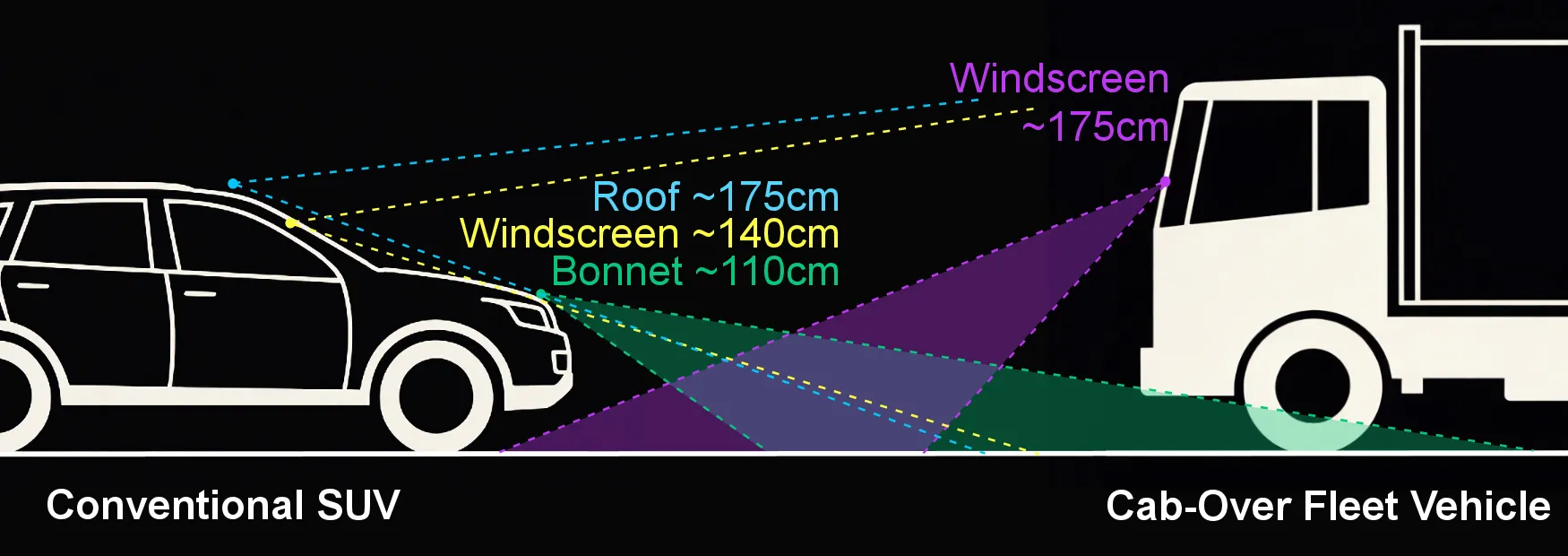
Three mounting positions were tested on a standard SUV, each representing a practical deployment option for fleet vehicles.
Position 1 — Bonnet Mount Camera secured to the bonnet, approximately 110 cm above the road surface, angled downward at 15–20° below horizontal.
Position 2 — Windscreen / Dashcam Mount Camera mounted to the windscreen inside the cabin, approximately 140 cm above the road surface, angled downward at 0–5° below horizontal.
Position 3 — Roof Mount Camera mounted on the roof, approximately 175 cm above the road surface, angled downward at 0–5° below horizontal.
The roof and windscreen positions both give away a meaningful share of the frame to the vehicle itself. The bonnet mount, by contrast, keeps the road surface dominant in the image but there is some motion blur.
The Geometry of Each Position
After looking at the footage, it is worth understanding what the numbers actually imply.
Four things follow directly from mounting height and tilt angle:
- Working distance — how far along the road surface the camera’s optical axis points. Shorter means the camera is focused on closer road content; longer means it is looking further ahead.
- Ground sampling distance (GSD) — how many millimetres of road surface each pixel represents at the working distance. Shorter working distance = smaller GSD = more detail per pixel.
- Apparent motion — how fast the road surface appears to move across sensor pixels at a given vehicle speed. Shorter working distance = faster apparent motion = greater risk of motion blur.
- Shutter speed floor — the minimum shutter speed needed to keep motion blur below one pixel. This floor rises as working distance falls and GSD improves.
The table below works through these figures for each position at 40 km/h, based on an action camera shooting 1920×1080 frames.
| Mount | Height | Tilt Angle | Working Distance | GSD (approx.) | Min. Shutter for <1 px blur at 40 km/h |
|---|---|---|---|---|---|
| Bonnet | 110 cm | 15–20° | 3.0–4.2 m | ~3.0–4.0 mm/px | ~1/2000–1/3000 s |
| Windscreen | 140 cm | 5–10° | ~8.0–16.0 m | ~8.0–16.0 mm/px | ~1/500–1/1200 s (est.) |
| Roof | 175 cm | 5–10° | ~10.0–20.0 m | ~10.0–20.0 mm/px | ~1/400–1/1000 s (est.) |
A few things stand out. The bonnet mount offers the best ground resolution of the three. Its shorter working distance means more pixels per metre of road surface. The roof mount and bonnet mount are roughly comparable on GSD.
But GSD alone does not determine which position produces the most useful data.
These constraints compound with better resolution costing something in exposure.
The Vibration Problem
The experiment also surfaced something I did not fully anticipate.
Vibration from the road surface has a meaningful impact on image quality particularly at higher speeds and on rougher surfaces. It shows up as motion blur, frame wobble, and loss of fine surface texture in the captured images even from a windshield mount inside the cabin. Those fine textures,the early crack patterns, the surface depressions, are exactly what a defect detection model needs most.
The standard fix for vibration‑related blur is a higher shutter speed. But this is a difficult trade‑off.
In low light, the fix makes the problem worse.
At the shutter speeds needed to freeze motion at 40 km/h, sensor noise increases and image brightness falls significantly under overcast or heavily shaded conditions. The GoPro’s sensor handles low light better than most, but it cannot escape the underlying physics and has shutter speed limitations for continuous capture.
This is a constraint we should revisit later.
What This Means for Fleets
The bonnet mount works well for standard passenger vehicles and low‑front light commercial vans. But many of the fleet vehicles best suited for network‑wide sensing such as rubbish trucks, buses, heavy freight vehicles do not have a conventional bonnet.
For these vehicles, the most practical option is an interior cabin dashcam: forward‑facing, mounted behind the windscreen, angled to maximise the road field of view.
This approach avoids the occlusion problem entirely as there is no bonnet to fill the frame but it introduces a new set of constraints:
- Light attenuation through glass — windscreens filter UV and reduce sensor sensitivity in certain lighting conditions
- Glare and reflections — dashboard reflections, interior lighting, and low‑angle sun all affect image quality
- Wiper sweep zone — camera placement needs to account for wiper coverage, particularly in rain
- Angle limitations — the cabin interior constrains how steeply the camera can be angled, which raises the working distance and reduces achievable GSD
This is a reasoned extension of the bonnet finding and requires field‑testing on a vehicle later.
Where This Leaves Us
Three positions tested with clear trade-offs for car‑based deployments. A geometry framework that connects mounting height and tilt angle to working distance, GSD, and the shutter speed floor. And a vibration constraint that is real and persistent.
The bonnet mount gives us the most usable data per frame. It will be the baseline for subsequent car‑mounted experiments.
But before any of this data can be shared publicly, there is a problem we need to solve first.
Many images collected on a public road contain number plates. Before the dataset can be published, analysed collaboratively, or used to train a shared model, those plates need to be detected and redacted.
In the next post, we will build a number plate detection model using the images collected so far and explore what privacy‑preserving sensing looks like in practice.